мЮХАНКЕЕ ЯКНФМНИ БШЦКЪДХР ГЮДЮВЮ ГЮЫХРШ ЯУЕЛШ НР ОНЛЕУ Х КНФМШУ ЯПЮАЮРШБЮМХИ. гЮЫХРЮ ЛНФЕР НЯСЫЕЯРБКЪРЭЯЪ ЯУЕЛНРЕУМХВЕЯЙХЛХ ОПХЕЛЮЛХ, ЙНМЯРПСЙРХБМШЛХ ЯОНЯНАЮЛХ Х ОПНЦПЮЛЛМШЛХ ЯПЕДЯРБЮЛХ.
лНДСКЭ ЙНМРПНККЕПЮ ДНКФЕМ ЯНДЕПФЮРЭ БЯЕ МЕНАУНДХЛШЕ СЯРПНИЯРБЮ ОХРЮМХЪ, ТХКЭРПШ Х НЦПЮМХВХРЕКХ ЯХЦМЮКНБ, СЯХКХРЕКХ БШУНДМШУ ХЛОСКЭЯНБ СОПЮБКЕМХЪ.
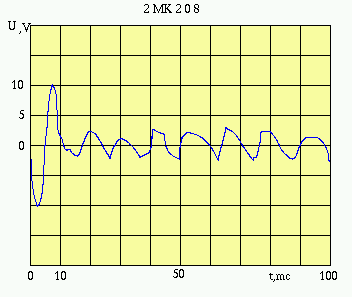
яХЦМЮК ХМДСЙЖХНММНЦН ДЮРВХЙЮ ОНКНФЕМХЪ ПНРНПЮ ЦЕМЕПЮРНПЮ 2лй208
яХЦМЮКШ ДЮРВХЙЮ ОПХ МХГЙХУ Х БШЯНЙХУ НАНПНРЮУ ДБХЦЮРЕКЪ НРКХВЮЧРЯЪ ЮЛОКХРСДНИ Х ВЮЯРНРНИ. тНПЛЮ ЯХЦМЮКЮ НЯРЮЕРЯЪ ОПЮЙРХВЕЯЙХ МЕХГЛЕМММНИ. (мЮ ПХЯСМЙЕ ОНЙЮГЮМЮ НЯЖХККНЦПЮЛЛЮ ЯХЦМЮКЮ ДЮРВХЙЮ ДКЪ ВЮЯРНРШ БПЮЫЕМХЪ 600 НА/ЛХМ).
дКЪ НРТХКЭРПНБШБЮМХЪ ЛЕЬЮЧЫХУ ЯХЦМЮКНБ ОПХЛЕМЪЧРЯЪ ПЮГКХВМШЕ ЛЕРНДШ. рЮЙ, Б ЯУЕЛЕ ЬРЮРМНЦН АКНЙЮ айя-1лй211 ОПХЛЕМЕМ ЛЕРНД БШДЕКЕМХЪ Х ГЮОНЛХМЮМХЪ ОХЙНБНЦН МЮОПЪФЕМХЪ ЯХЦМЮКЮ, Х ОПХМЪРХЪ ЕЦН Б ЙЮВЕЯРБЕ НОНПМНЦН (ОНЪЯМЕМХЪ)
дПСЦНИ ЛЕРНД ГЮЙКЧВЮЕРЯЪ Б ХЯОНКЭГНБЮМХХ ХМРЕЦПХПСЧЫЕЦН ТХКЭРПЮ - КХАН БМЕЬМЕЦН, КХАН ХЯОНКЭГСЧЫЕЦН ХМДСЙРХБМШЕ ЯБНИЯРБЮ ЙЮРСЬЕЙ ДЮРВХЙЮ.
б ЯЮЛНЛ ДЕКЕ, Я РЮЙХЛ ТХКЭРПНЛ ЮЛОКХРСДЮ БУНДМНЦН ЯХЦМЮКЮ ОПЮЙРХВЕЯЙХ МЕХГЛЕММЮ Б ЬХПНЙНЛ ДХЮОЮГНМЕ ВЮЯРНР БПЮЫЕМХЪ. щРН ЯСЫЕЯРБЕММН НАКЕЦВЮЕР ГЮДЮВС ОНЯКЕДСЧЫЕИ ТХКЭРПЮЖХХ Х НАПЮАНРЙХ ЯХЦМЮКЮ.
б ЯРЮРЭЕ Н ЦЕМЕПЮРНПЮУ
ОПХБЕДЕМЮ Б ЙЮВЕЯРБЕ ОПХЛЕПЮ ЯУЕЛЮ БМЕЬМЕЦН R-C ТХКЭРПЮ.
яУЕЛЮ, ХЯОНКЭГСЧЫЮЪ ХМДСЙРХБМШЕ ЯБНИЯРБЮ ЙЮРСЬЕЙ ДЮРВХЙЮ,
ОПХБЕДЕМЮ МХФЕ:
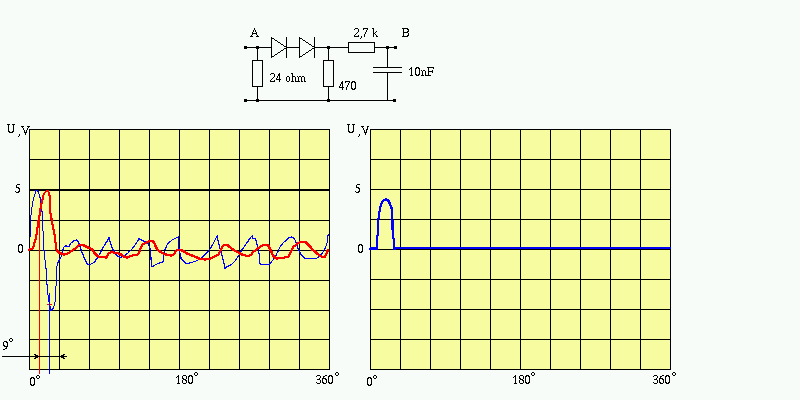
дЮРВХЙ МЮЦПСФЕМ ПЕГХЯРНПНЛ 24 НЛ. щРН ЯНОПНРХБКЕМХЕ ЯСЫЕЯРБЕММН
ЛЕМЭЬЕ ХМДСЙРХБМНЦН ЯНОПНРХБКЕМХЪ ЙЮРСЬЕЙ ДЮРВХЙЮ,
ОНЩРНЛС МЮОПЪФЕМХЕ МЮ ПЕГХЯРНПЕ НЙЮГШБЮЕРЯЪ ОНДБЕПФЕММШЛ
КХМЕИМНИ ТХКЭРПЮЖХХ. ю ОНЯЙНКЭЙС ХМДСЙРХБМНЕ ЯНОПНРХБКЕМХЕ
ЙЮРСЬЕЙ ПЮЯРЕР БЛЕЯРЕ Я ХУ Щ.Д.Я., РН МЮОПЪФЕМХЕ МЮ ПЕГХЯРНПЕ
НЙЮГШБЮЕРЯЪ ЛЮКН ГЮБХЯЪЫХЛ НР ВЮЯРНРШ БПЮЫЕМХЪ ЦЕМЕПЮРНПЮ, РН ЕЯРЭ -
ЯРЮАХКХГХПНБЮММШЛ
тНПЛЮ МЮОПЪФЕМХЪ ДЮРВХЙЮ ОНЙЮГЮМЮ ЯХМХЛ ЖБЕРНЛ. дЮРВХЙЮ,
МЮЦПСФЕММНЦН МЮ ПЕГХЯРНП - ЙПЮЯМШЛ ЖБЕРНЛ. х, МЮЙНМЕЖ,
ТНПЛЮ БШУНДМНЦН МЮОПЪФЕМХЪ ТХКЭРПЮ ОНЙЮГЮМН МЮ ОПЮБНЛ ПХЯСМЙЕ.
дХНДМЮЪ ЖЕОНВЙЮ ОПЕДМЮГМЮВЕМЮ ДКЪ НРЯЕВЙХ ОНЛЕУ. юЛОКХРСДЮ ОНЛЕУ ЯНЯРЮБКЪЕР НЙНКН 2/5 ЮЛОКХРСДШ ОНКЕГМНЦН ЯХЦМЮКЮ. дБЮ НАШВМШУ ЛЮКНЛНЫМШУ БШОПЪЛХРЕКЭМШУ ДХНДЮ ОПНОСЯЙЮЧР МЮОПЪФЕМХЕ, ОПЕБШЬЮЧЫЕЕ 1,4 БНКЭР, РЕЛ ЯЮЛШЛ ОНДЮБКЪЪ ЛЕЬЮЧЫХЕ ОСКЭЯЮЖХХ АНКЕЕ МХГЙНЦН СПНБМЪ.
пЕГХЯРНП 2,7 ЙнЛ ЯКСФХР ДКЪ ГЮЫХРШ БУНДНБ ЛХЙПНЯУЕЛШ ЙНМРПНККЕПЮ НР БНГЛНФМШУ ОЕПЕМЮОПЪФЕМХИ.
йНМДЕМЯЮРНП 10 Мт ЪБКЪЕРЯЪ РЮЙФЕ ДНОНКМХРЕКЭМНИ ГЮЫХРНИ НР ХЛОСКЭЯМШУ ОНЛЕУ.
нАПЮРХРЕ БМХЛЮМХЕ: ОНКЪПМНЯРЭ ОНДЙКЧВЕМХЪ ДЮРВХЙЮ НАПЮРМЮЪ ОН ЯПЮБМЕМХЧ ЯН ЬРЮРМНИ. щРН МЕНАУНДХЛН ДКЪ ТНПЛХПНБЮМХЪ БШУНДМШУ ХЛОСКЭЯНБ Я ТНПЛНИ, СДНАМНИ ДКЪ ОНЯКЕДСЧЫЕЦН ХЯОНКЭГНБЮМХЪ.
йЮЙ БХДМН МЮ НЯЖХККНЦПЮЛЛЮУ, ТПНМР ЯХЦМЮКЮ МЮ БШУНДЕ ТХКЭРПЮ ЯЛЕЫЕМ НРМНЯХРЕКЭМН НАШВМНЦН ЛНЛЕМРЮ ТНПЛХПНБЮМХЪ ХЯЙПШ. щРН ЯЛЕЫЕМХЕ ЯНЯРЮБКЪЕР 9..10 ЦПЮДСЯНБ Б ЯРНПНМС АНКЕЕ ПЮММЕЦН ГЮФХЦЮМХЪ.
вЮЯРЭ БРНПЮЪ. нОХЯЮМХЕ ЮБРНЛЮРЮ ЙНППЕЙЖХХ снг МЮ НЯМНБЕ ЛХЙПНЙНМРПНККЕПЮ
24.07.2003. - 22.10.2004.